
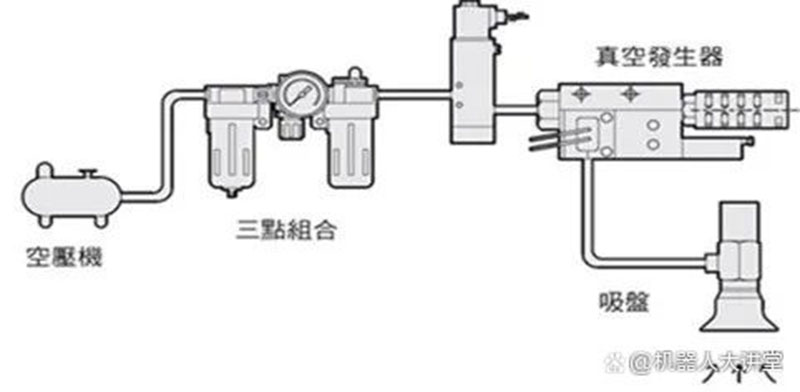
Kutoka kwa mtazamo wa muundo wa kazi, utekelezaji wa jenereta ya utupu ni hasa valve ya kudhibiti sumakuumeme ili kudhibiti jenereta ya utupu kutambua kizazi cha shinikizo hasi na kuacha, ili kufikia kazi ya kuvutia na kuachilia workpiece.
Matokeo yake, mfumo kwa ujumla unajumuisha vipengele vifuatavyo: 1. Chanzo cha hewa iliyoshinikizwa;2. Chuja;3. Kubadili valve ya solenoid;4. Kitendaji cha utupu;5. Komesha kikombe cha kunyonya, mfuko wa hewa, nk (Muundo wa kawaida unaonyeshwa kwenye takwimu hapa chini).
Aidha, chini ya mahitaji ya mitambo ya kiotomatiki ya viwandani, ili kutambua ufuatiliaji wa mchakato wa utangazaji wa utupu, baadhi ya watengenezaji kwa ujumla huongeza vipengele vya udhibiti wa nyumatiki kama vile mita za mtiririko, swichi za kutambua shinikizo na swichi za ukaribu kwenye mfumo katika miaka ya hivi karibuni.
Hata hivyo, kwa kuwa vipengele vingi vinarekebishwa na kiunganishi kulingana na mahitaji ya wateja na hali ya kazi kwenye tovuti, utata wa mfumo mzima mara nyingi ni wa juu.
Wakati huo huo, wazalishaji wa vipengele vingi husababisha ufungaji tata na kazi ya kuwaagiza kwenye tovuti, na baadhi yao wana matumizi ya juu ya nishati na utegemezi wa 100% kwenye vyanzo vya gesi.Ujumuishaji wa sehemu unaweza usiwezekane
Epuka uchafuzi wa kelele, ambayo inamaanisha matatizo yasiyokubalika kwa usahihi wa hali ya juu na mazingira ya usafi wa hali ya juu kama vile betri za lithiamu na halvledare.
Kwa ujumla, EVS ni kizazi kipya cha kitendaji cha utupu cha akili cha umeme ambacho hakihitaji chanzo cha ziada cha hewa kilichobanwa, ambacho bila shaka kinavutia macho.
Faida kubwa ya mfumo wa kuokoa hewa ni urahisi wa ufungaji.Kwa sababu hii bila shaka inaweza kupunguza vipengele vingi vya msaidizi, ikiwa ni pamoja na compressors hewa, tank ya kuhifadhi hewa, vifaa vya kusafisha hewa, na mabomba ya pato, nk, kufanya wiring rahisi na rahisi zaidi na wazi kwa wateja kutumia.
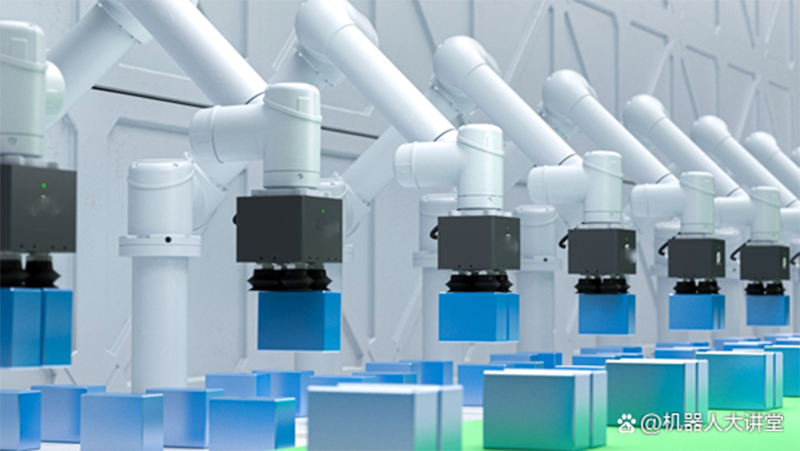
Inaripotiwa kuwa kwa sasa, matukio mengi ikiwa ni pamoja na majukwaa ya roboti za rununu, mkusanyiko wa kielektroniki wa 3C, utengenezaji wa betri za lithiamu, utengenezaji wa semiconductor, vifaa vya kueleza, n.k. yana mpangilio wa nafasi fupi kiasi.
Betri ya mraba ya EVS08
Maelezo zaidi na faida
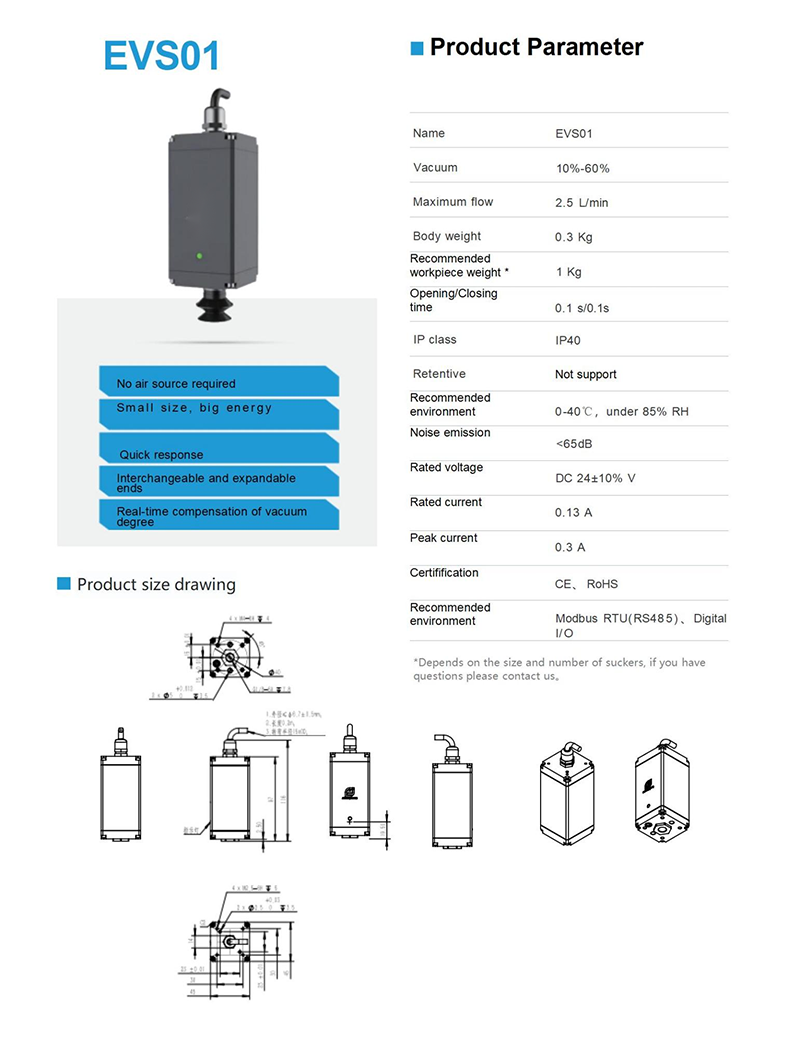
Ukumbi wa mihadhara ya roboti ulijifunza kuwa bidhaa hii, ambayo inaonekana ndogo sana na ina uzito wa kilo 2.5 tu, inaweza kufikia kiwango cha juu cha 10kg.Kutokana na muundo wa 24V wa voltage ya chini, matumizi ya nishati ni 20% ya mfumo wa nyumatiki wa jadi, na nguvu ya adsorption mwishoni inaweza kuweka na kurekebishwa, na nguvu ya adsorption inaweza kufikia 102-510N.
Kwa upande wa muundo wa muundo, EVS inachukua muundo wa muundo wa kompakt zaidi na nyepesi, ambao hufanya EVS 30% kuwa ndogo kuliko aerodynamics ya jadi kwa uzito sawa wa mzigo.
Wakati huo huo, inaweza kuunganishwa moja kwa moja kwenye kiunganishi mwishoni mwa mkono wa roboti, ambayo hupunguza vipengele vya msaidizi visivyohitajika, inafanya iwe rahisi zaidi kutumia, inaweza kutumwa kwa haraka, na inaweza kunyonya kwa urahisi vitu vingi vingi, hasa vinavyofaa. kuweka, kushughulikia na shughuli zingine za eneo.
Ili kuboresha urahisi wa matumizi, actuator ya utupu wa umeme pia ina interface jumuishi, ambayo inaweza kutumika kudhibiti na kufuatilia mchakato mzima wa vitu vya adsorbing.
Inaripotiwa kuwa hii ni kwa ajili ya urahisi wa wateja kudhibiti shahada ya utupu ya actuator ya utupu kupitia maagizo, na pia kuunganisha kupitia kiungo cha IO kwa ufuatiliaji na matengenezo ya utabiri wa mchakato wa adsorption.Ufuatiliaji wa hali utapunguza makosa na muda wa chini na kuhakikisha upatikanaji wa mfumo.
Kwa msingi huu, faida na sifa za EVS pia zinaonyeshwa katika mambo yafuatayo:
1. Muundo thabiti na uzani mwepesi: EVS ni ndogo kwa 30% kuliko saizi ya nyumatiki ya jadi wakati wa kunyonya uzito sawa wa mzigo.Inaweza kuunganishwa na kontakt mwishoni mwa mkono wa mitambo ili kutambua ngozi ya mzigo, hasa inafaa kwa stacking, utunzaji na shughuli nyingine za eneo;
2. Usanidi mwingi wa vituo: Aina mbalimbali za vikombe vya kunyonya, mifuko ya hewa na vipengele vingine vinaweza kusanidiwa ili kutambua kushikana kwa vitu mbalimbali, ikiwa ni pamoja na vipengele vya mraba, spherical na umbo maalum;
3. Njia mbili zinaweza kudhibitiwa kwa kujitegemea: kudhibiti kwa urahisi pande za kushoto na za kulia za actuator ya utupu, na pande hizo mbili ni huru kwa kila mmoja, kuboresha zaidi ufanisi wa kazi ya mstari wa uzalishaji.Inatambua kunyonya na kuwekwa kwa wakati mmoja, ambayo inawezesha sana utunzaji na upangaji wa vitu, kuokoa nafasi na wakati;
4. Uvutaji unaoweza kurekebishwa: kiwango cha utupu kinaweza kubadilishwa kulingana na sifa za bidhaa iliyonyonywa, na fidia ya utupu ya wakati halisi inaweza kupatikana;
5. Maoni ya hali: Ina kihisi cha maoni cha utupu, ambacho kinaweza kutambua hali ya utangazaji wa vitu kwa wakati halisi, na kutoa maoni na kengele;
6. Ulinzi wa kuzima: Baada ya kuzima, inaweza kutambua kujifungia kwa nguvu ya adsorption ili kulinda vitu vilivyotangazwa;
7. Kubadilika kwa nguvu: kuunga mkono itifaki ya mawasiliano ya 24V I/O na MODBUS RTU (RS485);
8. Rahisi kufunga na kurekebisha: itifaki ya mawasiliano ni rahisi na inasomeka, ambayo inapunguza sana ugumu wa kufuta.Kwa kuongeza, programu ya utatuzi wa kompyuta mwenyeji inaweza kuambatishwa kama zawadi, ambayo inaweza kuwekwa na kuhaririwa ili kuweka vigezo vya utendakazi nje ya mtandao.
Hitimisho na siku zijazo
Chini ya mwenendo wa otomatiki na akili, vitendaji vya utupu wa umeme vimezidi kuwa sehemu muhimu ya kuhakikisha utendakazi wa kawaida wa roboti na mifumo ya otomatiki, na kufanya utumiaji wa mifumo ya kiamsha umeme iwe rahisi zaidi na rahisi kutumia, na inaweza kukidhi hali tofauti zaidi kama vile. roboti zenye mchanganyiko wa rununu..
Kiolesura kilichounganishwa na usanidi tajiri wa terminal na uboreshaji mwingine unaweza kuboresha zaidi kutegemewa kwa vipengele muhimu vya roboti, kupunguza kusimamishwa kwa uzalishaji na matatizo ya uwekaji wa mbali kwa watumiaji wa mwisho, na kupunguza zaidi gharama za matengenezo na baada ya mauzo.
Muda wa kutuma: Apr-19-2023